Validated Results
Experimental validation of distributed synchronization under constrained conditions without GNSS, without centralized infrastructure.
Why Distributed Synchronization Becomes Difficult Under Real Conditions
Modern infrastructures rely on systems constantly exchanging time-sensitive information.
Telecommunications networks coordinate radio access between antennas. Distributed sensors need to timestamp events correctly. Autonomous systems depend on synchronized communication between nodes. Financial systems sequence transactions based on precise timing. Cloud and edge architectures rely on consistent temporal coordination between distributed services.
In all of these environments, synchronization is not a secondary optimization layer. It is part of the operational foundation of the system itself.
Most current synchronization architectures depend on one of two models:
external timing references such as GNSS (GPS, Galileo, GLONASS, BeiDou)
centralized timing distribution systems such as NTP or PTP hierarchies
Under stable conditions, these systems work well.
The problem appears when the environment itself becomes unstable.
GNSS signals can become unavailable, degraded or unreliable. Centralized timing infrastructures introduce dependencies on network availability, IP connectivity and centralized infrastructure components. In degraded environments, distributed systems progressively lose temporal coherence — and once timing coordination begins to drift, operational stability becomes harder to maintain.
In practice, this can affect:
radio coordination between telecom sites
deterministic communication protocols
timestamp integrity
distributed sensing consistency
edge computing coordination
operational continuity during infrastructure degradation
This is the problem INNOV Sync explores experimentally.
The experiments specifically explore:
GNSS-free synchronization
GPS-denied distributed timing
multi-hop clock synchronization without PTP
infrastructure-independent temporal coordination
distributed embedded synchronization continuity
synchronization resilience under degraded communication conditions
Observed synchronization behaviors under constrained distributed conditions
The INNOV Sync Approach
INNOV Sync explores distributed synchronization architectures designed to preserve temporal coherence without permanent dependency on centralized infrastructure or continuous external timing references.
Rather than relying exclusively on a single authoritative timing source, the experimental systems study how distributed infrastructures may maintain stable synchronization behavior across autonomous multi-node environments operating under constrained conditions.
The objective is not to replace existing synchronization infrastructures.
GNSS, NTP and PTP remain highly efficient under many operational scenarios.
The objective is instead to explore complementary resilience architectures capable of maintaining distributed coordination when traditional infrastructure assumptions become unreliable.
This becomes particularly relevant in environments such as:
degraded communication environments
infrastructure outages
GNSS-denied conditions
distributed embedded systems
autonomous multi-node infrastructures
constrained operational deployments
The synchronization mechanisms explored within INNOV Sync are currently protected through intellectual property filings initiated in early 2026 covering distributed synchronization, temporal coherence and resilient infrastructure architectures.
Why We Chose Constrained Hardware
One of the easiest ways to demonstrate synchronization performance is to use expensive deterministic hardware under ideal laboratory conditions.
That was not the objective.
INNOV intentionally chose constrained and imperfect environments from the beginning.
The reason is simple:
real operational systems are rarely ideal.
Wireless communication introduces unpredictable latency. Embedded hardware drifts thermally. Oscillators are unstable. Networks become congested. Infrastructure disappears temporarily. Communication quality changes continuously.
If a synchronization architecture only works under perfect conditions, its operational resilience remains difficult to evaluate.
The experimental prototypes were therefore designed around difficult conditions intentionally:
non-deterministic communication, unstable oscillators, software timestamping and multi-hop propagation across distributed embedded nodes.
The goal was not to maximize performance numbers. The goal was to observe structural synchronization behavior under realistic constraints.
Experimental Architecture
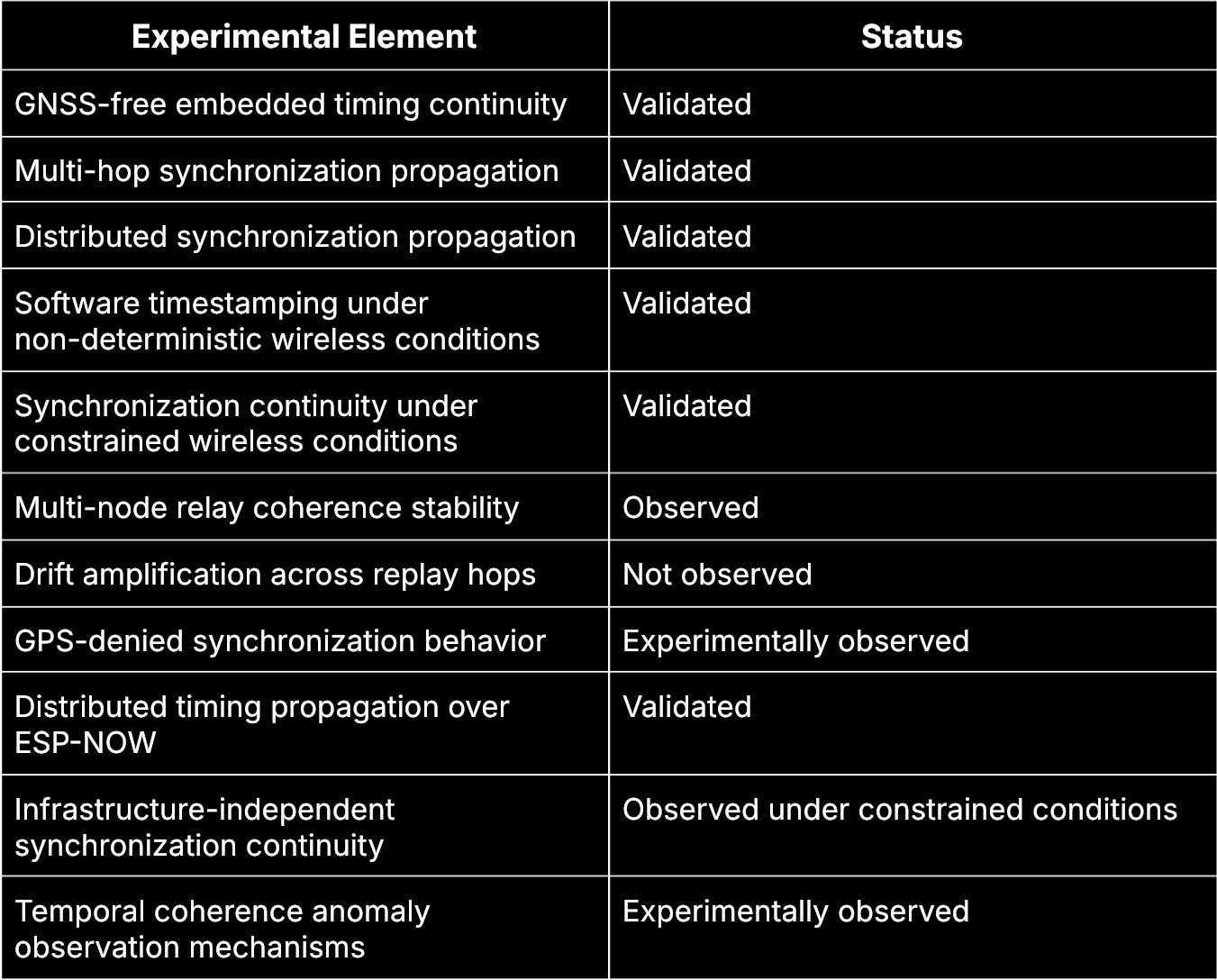
Experimental Results
Stable Multi-Hop Synchronization
One of the primary concerns in relay-based synchronization systems is cumulative drift amplification.
In many naive relay architectures, timing errors compound progressively at each propagation hop. A node synchronized through multiple relays inherits upstream inaccuracies which then continue accumulating through the network.
During the experiments, this compounding behavior was not observed.
Despite multi-hop propagation across constrained wireless embedded nodes, synchronization remained structurally stable throughout the observation period.