PTP, NTP and GNSS Timing — Performance, Resilience Limits and Degraded Condition Behavior
A technical overview of current synchronization architectures, their operational strengths, and the limitations they encounter under degraded real-world conditions.
Why Timing Infrastructure Matters
Modern distributed systems depend on a shared notion of time.
Telecommunications networks, industrial infrastructure, cloud platforms, financial systems and tactical communication architectures all rely on synchronized operations between geographically distributed nodes.
In many of these environments, timing is not simply a background technical parameter. It directly affects:
distributed coordination
protocol stability
timestamp integrity
radio synchronization
failover behavior
operational continuity
deterministic communication systems
infrastructure consistency
As infrastructures become increasingly distributed and latency-sensitive, synchronization resilience becomes a broader infrastructure engineering challenge.
The question is no longer only:
“How precise is the timing system under ideal conditions?”
The more important question increasingly becomes:
“How does the timing architecture behave when operating conditions are no longer ideal?”
Three dominant approaches currently define most modern synchronization infrastructures:
GNSS-disciplined timing
Network Time Protocol (NTP)
Precision Time Protocol (PTP / IEEE 1588)
All three perform effectively under nominal conditions.
All three also encounter operational boundaries under degraded environments.
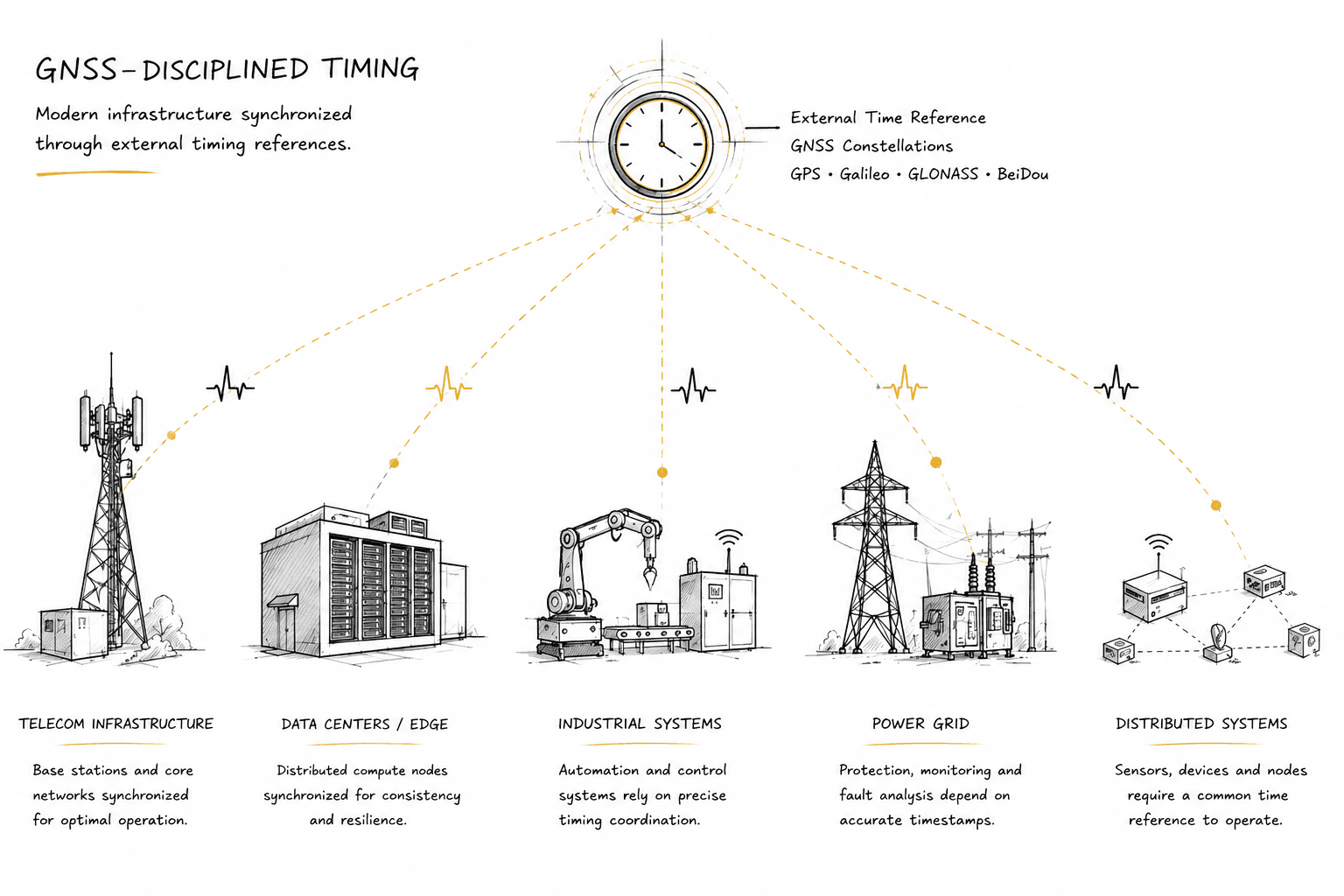
GNSS-Disciplined Timing
GNSS-disciplined clocks combine a local oscillator with timing references derived from satellite constellations such as GPS, Galileo, GLONASS or BeiDou.
These systems are commonly referred to as GNSS-disciplined oscillators (GPSDOs) within telecommunications and timing infrastructure environments.
Under stable conditions, these systems provide extremely high timing accuracy and became the primary timing reference for:
telecom infrastructure
power grid synchronization
financial timestamping
industrial timing systems
distributed operational networks
This architecture performs well when:
satellite visibility remains available
signal integrity remains stable
interference is limited
the local oscillator maintains acceptable holdover behavior
The challenge appears when these assumptions no longer hold consistently.
GNSS signals typically arrive at ground level around -130 dBm, making them inherently sensitive to:
interference
jamming
constrained propagation environments
degraded electromagnetic conditions
GNSS signals operate at extremely low received power levels, making them vulnerable to:
interference
jamming
signal degradation
constrained visibility environments
Dense urban areas, underground infrastructure, industrial environments and contested electromagnetic conditions may all affect signal reliability.
Spoofing introduces an additional concern: receivers may continue operating while processing manipulated timing information that appears legitimate from the receiver’s perspective.
When GNSS availability degrades, systems rely on local oscillator holdover.
Holdover behavior depends heavily on oscillator quality. Standard TCXO oscillators may drift by several microseconds per hour, while OCXO and rubidium references provide significantly longer stability windows under signal loss conditions.
The quality of this holdover depends entirely on oscillator stability and eventually degrades over time as drift accumulates.
Holdover extends operational continuity.
It does not eliminate dependency on external timing recovery.
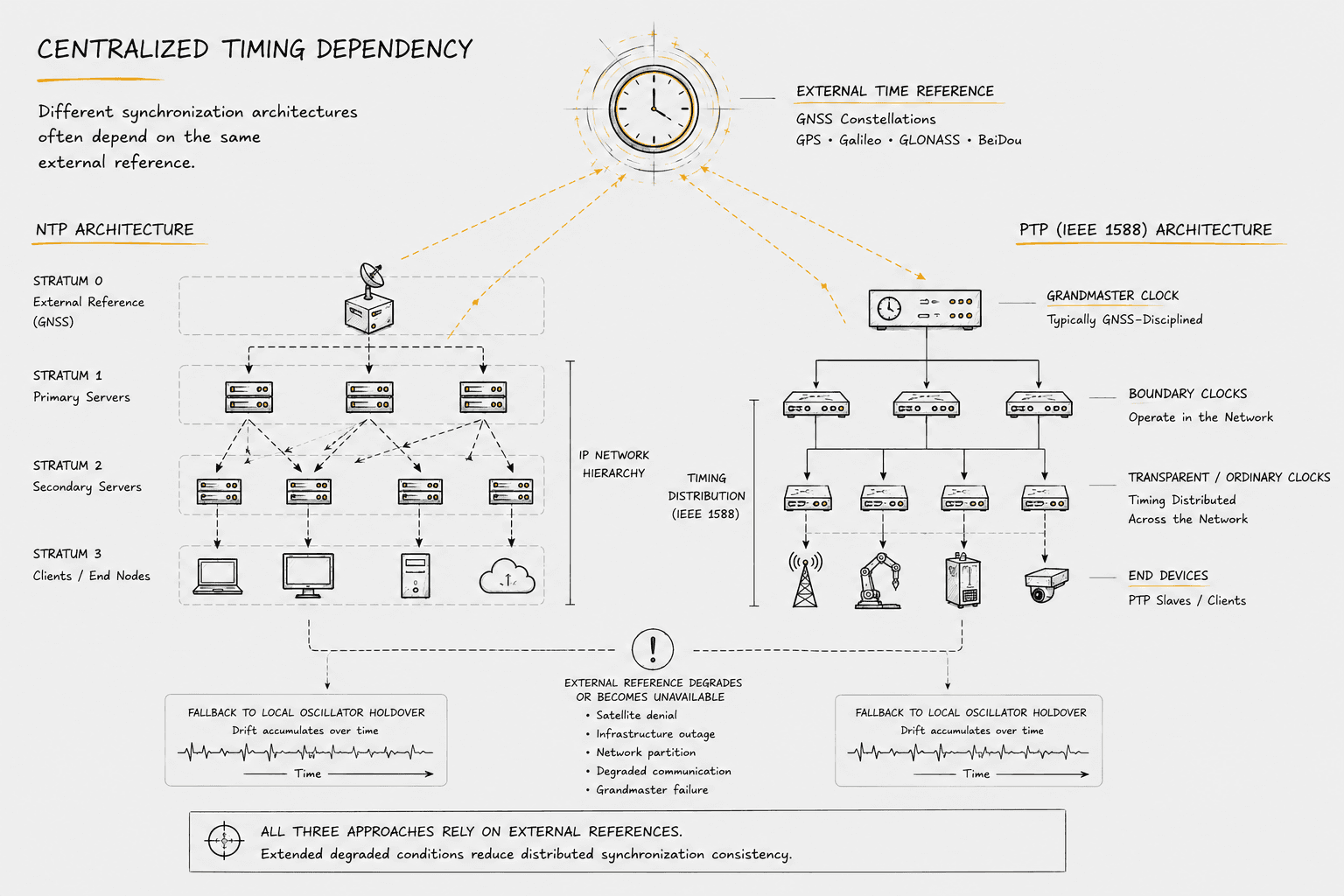
Network Time Protocol (NTP)
NTP distributes timing across IP networks through hierarchical synchronization layers.
The protocol remains widely deployed because it is:
mature
scalable
inexpensive
compatible with existing infrastructure
For many enterprise and cloud environments, NTP provides sufficient synchronization accuracy.
Under typical operating conditions, NTP synchronization accuracy generally ranges from:
1–10 milliseconds across public internet environments
sub-millisecond ranges on controlled local area networks
However, NTP was not designed for ultra-precise synchronization environments requiring sub-microsecond coordination.
Applications such as:
5G fronthaul synchronization
TDMA communication systems
synchrophasor timestamping
industrial real-time coordination
typically exceed NTP’s practical timing limits.
NTP also inherits an important structural dependency:
The synchronization hierarchy ultimately depends on upstream authoritative timing references, which frequently remain GNSS-disciplined systems.
Under degraded network conditions, additional limitations appear:
path asymmetry
packet delay variation
congestion
unstable routing behavior
As network quality degrades, synchronization consistency degrades alongside it.
Precision Time Protocol (IEEE 1588 PTP)
PTP was designed specifically for high-precision synchronization environments.
Unlike NTP, PTP relies heavily on hardware timestamping and infrastructure-aware timing correction mechanisms to achieve sub-microsecond synchronization accuracy.
This made IEEE 1588 PTP a major synchronization architecture for:
4G and 5G infrastructure
telecom fronthaul
industrial automation
power systems
distributed operational networks
Under controlled infrastructure conditions with hardware timestamping support, IEEE 1588 PTP may achieve synchronization precision within tens to hundreds of nanoseconds.
Under controlled conditions, PTP performs extremely well.
However, this performance depends on several infrastructure assumptions.
PTP infrastructures generally rely on:
highly stable grandmaster references
hardware timestamp support
carefully managed network paths
bounded latency environments
stable synchronization hierarchies
Telecommunications deployments frequently depend on telecom grandmaster infrastructures, T-BC boundary clock architectures and IEEE 1588 telecom profiles designed for 5G fronthaul synchronization environments requiring sub-microsecond coordination stability.
In most operational deployments, the grandmaster itself remains GNSS-disciplined.
This creates a structural dependency chain:
GNSS → grandmaster → distributed synchronization hierarchy.
When the external reference degrades, the synchronization hierarchy eventually degrades as well.
PTP also becomes significantly more complex in:
wireless multi-hop environments
dynamically changing topologies
constrained embedded systems
degraded communication conditions
disconnected operational scenarios
PTP was optimized primarily for controlled infrastructure environments rather than infrastructure-denied conditions.
The Shared Structural Limitation
Despite their different architectures, GNSS timing, NTP and PTP share a common characteristic.
All three ultimately depend on the continuous availability of an external reference or centralized synchronization hierarchy.
When that dependency becomes unavailable:
satellite denial
infrastructure outage
network partition
degraded communication conditions
grandmaster failure
distributed nodes fall back to local oscillator holdover behavior.
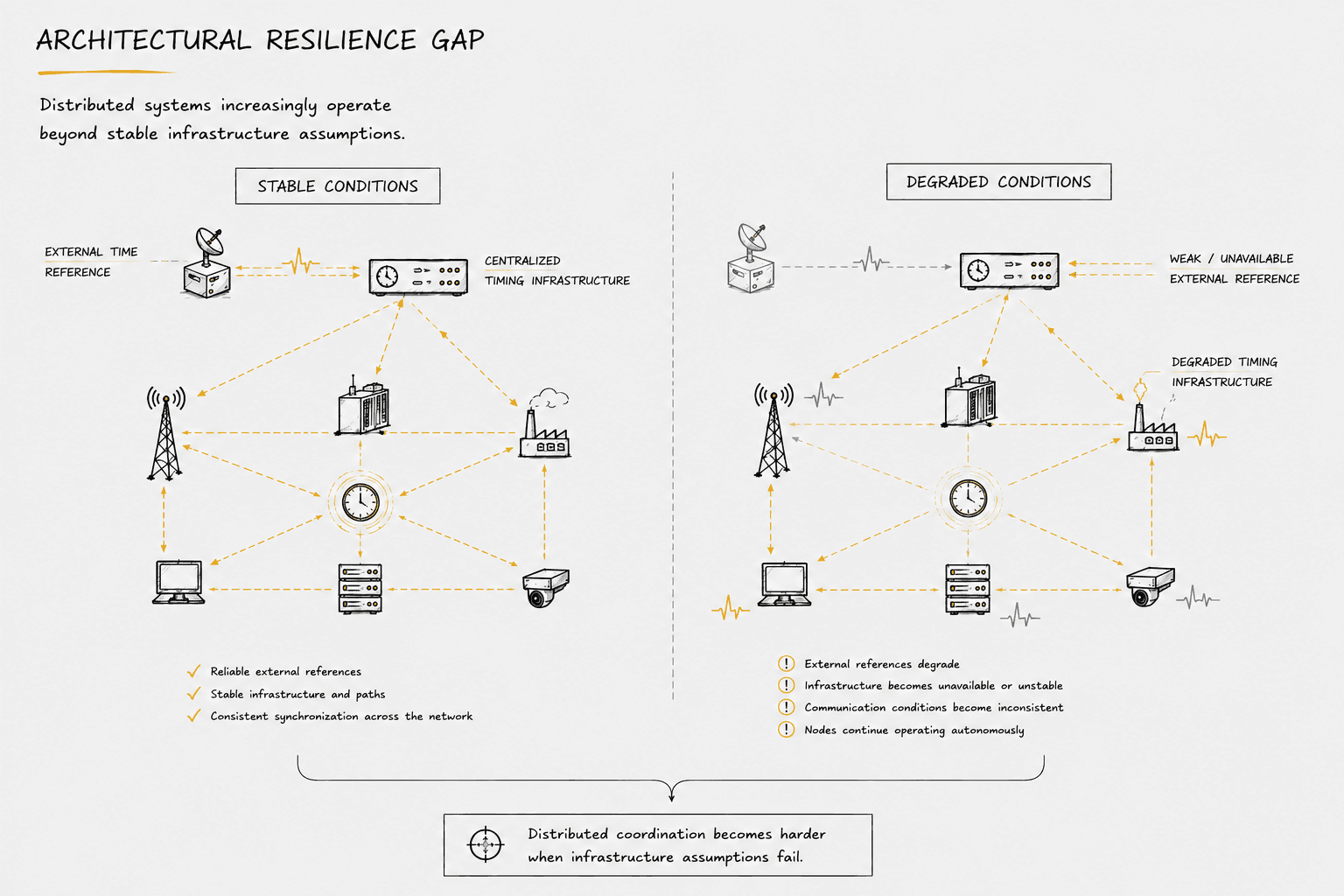
This approach remains effective for limited periods.
But extended degraded conditions expose a broader resilience gap:
most current timing architectures were designed assuming eventual recovery of the authoritative reference.
Very few architectures are designed around the assumption that degraded conditions themselves may persist operationally.